概述:强化学习中除了前面讲解的Qlearning、DQN等Value-Base算法以外,还存在着一种Policy Gradient,本文将对其原理与实现过程进行讲解。
Policy-Base RL 在前面的学习中,我们已经学习了很多种强化学习算法,这些强化学习算法无一例外,都在采用Value-Base的RL,即每一步都会有一个对应的Q值和V值(观测值),而我们整个学习过程就是要计算出处于各个V对应的Q值 ,但是这个Q与V值的计算并不是我们的最终目标啊,那我们可以有什么办法不需要计算Q值吗?答案就是另一种RL算法:基于Policy-Base的RL ,即直接根据策略是否能够达到最终目标而进行学习的强化学习算法。
核心思路 :根据一个策略中是否能够达到最终目标作为奖惩,反向传递到整个策略中的各个行为对各个行为被选择的可能性进行更新。
优势 :
连续动作空间与高维动作空间中更加高效
可以实现随机化策略
在某种环境下,价值函数可能比较难以计算,而策略函数比较容易计算
缺点 :
通常容易收敛到局部最优而非全局最优
由于每个epsoide结束才能进行更新,因此效率较低
Policy Gradient Policy-Base RL中最基础、最典型的算法就是Policy Gradient,该算法是尽管存在着效率低、难收敛等不足,虽是Policy的基础工作,但为后续Policy-Base RL与Policy-Base、Value-Base融合RL算法打下了基础。
1. 基本情况
【蒙特卡洛算法】
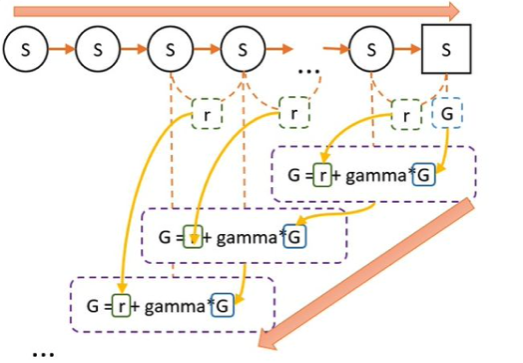
从某个state出发,然后一直走,直到最终状态。然后我们从最终状态原路返回,对每个状态评估G值。所以G值能够表示在策略下,智能体选择路径的好坏 。
在一次episode中,到达结束状态,我们计算蒙特卡洛方法中的所有G值。蒙特卡洛方法中,G值的计算方式为:
根据策略不断根据当前状态进行行为选择,并记录每一步选择获取的奖励r,直到完成任务。
完成任务后,从任务完成的状态开始向前回溯,计算每一个状态的G值。计算公式为
最后一个状态的获得的总奖励值即为最后一个状态的G值。
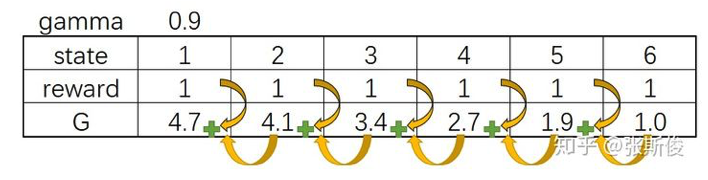
在下面的实例中,假设我们在一个episode中,经过6个state到达最终状态,G值的计算如下所示。
2. 直观理解 我们的Policy Gradient正需要一种算法可以做到,如果智能体选择了正确的决策,就让智能体拥有更多的概率被选择,如果智能体选择的行为是错的,那么智能体在当前转状态西选择这个行为的概率就会减少 ,由于蒙特卡洛方法中的G值可以直观衡量在策略表示下,智能体选择当前路径的好坏,因此将蒙特卡洛方法中的G值作为融入梯度更新算法中,如果到达当前节点的G值越大,那么这个节点的更新速率将越快。
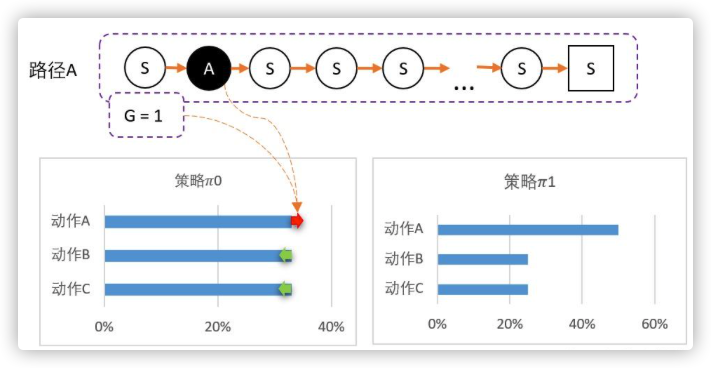
例如假设从某个state出发,可以采取三个动作,当前智能体对这一无所知,那么,可能采取平均策略 0 = [33%,33%,33%]。第一步随机选择了动作A,到达最终状态后开始回溯,计算得到第一步的状态对应的 G = 1。
我们可以更新策略,因为该路径选择了A 而产生的,并获得G = 1 ;因此我们要更新策略:让A的概率提升,相对地,BC的概率就会降低。 计算得新策略为: 1 = [50%,25%,25%]
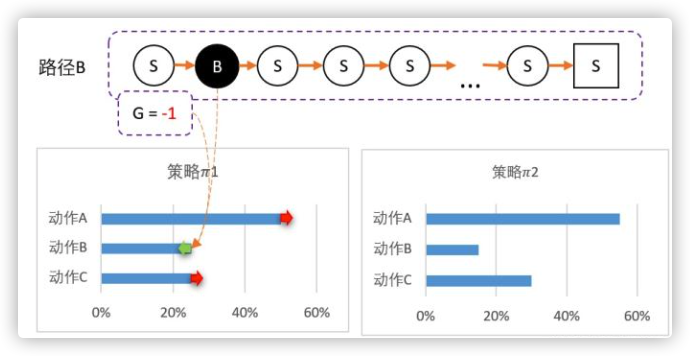
虽然B概率比较低,但仍然有可能被选中。第二轮刚好选中B。智能体选择了B,到达最终状态后回溯,计算得到 G = -1。
所以我们对B动作的评价比较低,并且希望以后会少点选择B,因此我们要降低B选择的概率,而相对地,AC的选择将会提高。计算得新策略为: 2 = [55%,15%,30%]
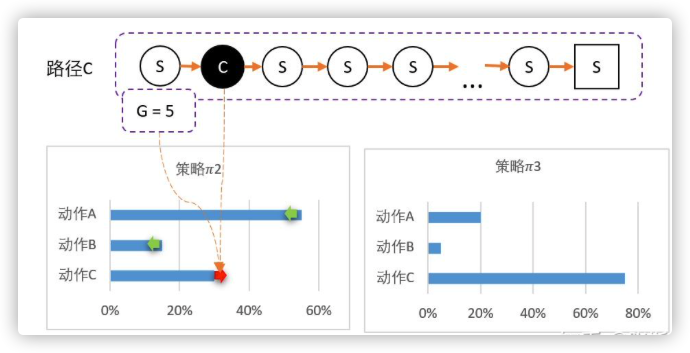
最后随机到C,回溯计算后,计算得G = 5。
C比A还要多得多。因此这一次更新,C的概率需要大幅提升,相对地,AB概率降低。 3 = [20%,5%,75%]
3.代码分析 更新框架 Policy Gradient的更新策略与前面学习到的强化学习算法的基本框架类似,具体环节包括:
开始游戏,重置state
根据当前state选择action
与环境进行交互,获得obvervation_、reward、done、info
记录数据(这里的记录数据与DQN中的记忆库中存储不同,这里并没有记忆库)
计算G值,开始学习
对应的代码如下:
1 2 3 4 5 6 7 8 for i_episode in range(num_episodes): observation = env.reset() while True : action = RL.choose_action(observation) observation_, reward, done, info = env.step(action) RL.store_transition(observation, action, reward) if done: vt = RL.learn()
这里需要的主要有两点:
在第4步中的存储数据与DQN中不同,DQN中的数据存储将(s,a,r,s_,d)五要素存储在记忆体中,并在需要的时候在队列中随机进行抽取。而在Policy Gradient中,数据存储只需要记录(s,a,r)三要素即可,而且记录的顺序一定不能打乱,因为G值的计算与这些记录的顺序有关,需要从后往前进行回溯 。
Policy Gradient是回合制更新,而不是每步更新,这里我们可以从第5步中看出。而DQN则为每步更新算法。
行为选择 在Policy Gradient算法中不再是使用$\epsilon$-greedy算法来进行,而是使使用神经网络预测出选择各个行为的概率值,然后按照这个概率值进行随机选择。具体的步骤如下:
根据观察值输入到网络中获取各个行为被选择的概率值
根据各个行为被选择的概率值,进行随机选择行为
实现的代码为:
1 2 3 4 5 6 7 8 9 def choose_action (self, observation) : observation = torch.FloatTensor(observation).to(device) network_output = self.network.forward(observation) with torch.no_grad(): prob_weights = F.softmax(network_output, dim=0 ).cuda(1 ).data.cpu().numpy() action = np.random.choice(range(prob_weights.shape[0 ]), p=prob_weights) return action
状态存储 Policy Gradient的记忆存储是将整个episode中的各个状态、行为、奖励三者进行有序存储,分别从存储在三个有序列表中。
1 2 3 4 5 6 7 self.ep_obs, self.ep_as, self.ep_rs = [], [], [] def store_transition (self, s, a, r) : self.ep_obs.append(s) self.ep_as.append(a) self.ep_rs.append(r)
G值计算 代码实现的思路如下:
创建全0向量,其大小与存储整个eposode中的reward的列表相同
反向循环计算G的值。
对G值进行归一化(可选,但是一般都需要,使用效果就更好)
具体代码实现如下所示,其中:
1 2 3 4 5 6 7 8 9 10 def _discount_and_norm_rewards (self) : discounted_ep_rs = np.zeros_like(self.ep_rs) running_add = 0 for t in reversed (range(0 , len(self.ep_rs))): running_add = running_add * GAMMA + self.ep_rs[t] discounted_ep_rs[t] = running_add discounted_ep_rs -= np.mean(discounted_ep_rs) discounted_ep_rs /= np.std(discounted_ep_rs) return discounted_ep_rs
带权重的梯度下降 在Policy Gradient中的梯度下降与其他模型的梯度下降相比略有不同,因为他的损失函数是在交叉熵损失函数的基础上又加入了各个状态的G值作为权重系数,然后加权计算loss。
通过网络求得整个episode中各个obversation对应的action预测值分布。
和真实值action进行比较,求交叉熵损失neg_log_prob
将交叉熵损失net_log_prob与G对应相乘,获得带权重的loss
反向传播进行参数更新
具体代码实现如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 def learn (self) : discount_and_norm_rewards = torch.FloatTensor(self._discount_and_norm_rewards()) softmax_input = self.network(torch.FloatTensor(self.ep_obs)) neg_log_prob = F.cross_entropy(input=softmax_input,target=torch.LongTensor(self.ep_as).to(device),reduction='none' ) loss = torch.mean(neg_log_prob * discount_and_norm_rewards) self.optimizer.zero_grad() loss.backward() self.optimizer.step() self.ep_obs, self.ep_as, self.ep_rs = [], [], []
这里我们以某一个状态为例对实际的意义进行讲解,在某个状态下,网络的预测值(logits)、真实值(ep_as)、G值(discounted_ep_rs_norm)可能存在下面的表情况,
跟我我们对神经网络训练的了解,预测值都会想真实值进行靠拢,而不同的G值决定了不同的靠拢速度,相同预测值与真实的情况下,G为2的学习速率将是G为1的两倍。
4. 完整代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 import gymimport torchimport torch.nn as nnimport torch.nn.functional as Fimport numpy as npimport randomimport timefrom collections import dequeGAMMA = 0.95 LR = 0.01 device = torch.device("cpu" if torch.cuda.is_available() else "cpu" ) class PGNetwork (nn.Module) : def __init__ (self, state_dim, action_dim) : super(PGNetwork, self).__init__() self.fc1 = nn.Linear(state_dim, 20 ) self.fc2 = nn.Linear(20 , action_dim) def forward (self, x) : out = F.relu(self.fc1(x)) out = self.fc2(out) return out def initialize_weights (self) : for m in self.modules(): nn.init.normal_(m.weight.data, 0 , 0.1 ) nn.init.constant_(m.bias.data, 0.01 ) class PG (object) : def __init__ (self, env) : self.state_dim = env.observation_space.shape[0 ] self.action_dim = env.action_space.n self.ep_obs, self.ep_as, self.ep_rs = [], [], [] self.network = PGNetwork(state_dim=self.state_dim, action_dim=self.action_dim).to(device) self.optimizer = torch.optim.Adam(self.network.parameters(), lr=LR) self.time_step = 0 def choose_action (self, observation) : observation = torch.FloatTensor(observation).to(device) network_output = self.network.forward(observation) with torch.no_grad(): prob_weights = F.softmax(network_output, dim=0 ).cuda(1 ).data.cpu().numpy() action = np.random.choice(range(prob_weights.shape[0 ]), p=prob_weights) return action def store_transition (self, s, a, r) : self.ep_obs.append(s) self.ep_as.append(a) self.ep_rs.append(r) def _discount_and_norm_rewards (self) : """ 计算每一个G值状态计算 """ discounted_ep_rs = np.zeros_like(self.ep_rs) running_add = 0 for t in reversed(range(0 , len(self.ep_rs))): running_add = running_add * GAMMA + self.ep_rs[t] discounted_ep_rs[t] = running_add discounted_ep_rs -= np.mean(discounted_ep_rs) discounted_ep_rs /= np.std(discounted_ep_rs) return discounted_ep_rs def learn (self) : self.time_step += 1 discounted_ep_rs = self._discount_and_norm_rewards() discounted_ep_rs = torch.FloatTensor(discounted_ep_rs).to(device) softmax_input = self.network.forward(torch.FloatTensor(self.ep_obs).to(device)) neg_log_prob = F.cross_entropy(input=softmax_input, target=torch.LongTensor(self.ep_as).to(device), reduction='none' ) loss = torch.mean(neg_log_prob * discounted_ep_rs) self.optimizer.zero_grad() loss.backward() self.optimizer.step() self.ep_obs, self.ep_as, self.ep_rs = [], [], [] ENV_NAME = 'CartPole-v0' EPISODE = 3000 STEP = 300 TEST = 10 def main () : env = gym.make(ENV_NAME) agent = PG(env) for episode in range(EPISODE): state = env.reset() for step in range(STEP): action = agent.choose_action(state) next_state, reward, done, _ = env.step(action) agent.store_transition(state, action, reward) state = next_state if done: agent.learn() break if episode % 100 == 0 : total_reward = 0 for i in range(TEST): state = env.reset() for j in range(STEP): action = agent.choose_action(state) state, reward, done, _ = env.step(action) total_reward += reward if done: break ave_reward = total_reward/TEST print ('episode: ' , episode, 'Evaluation Average Reward:' , ave_reward) if __name__ == '__main__' : time_start = time.time() main() time_end = time.time() print('The total time is ' , time_end - time_start)
参考文献